RV cikloidiniai rato reduktoriai yra plačiai pripažinti kaip pagrindiniai pramoninių robotų ir aukščiausios{0}}automatizacijos įrangos perdavimo komponentai. Palyginti su įprastais pavarų reduktoriais, RV reduktoriai yra specialiai sukurti reikalingoms reikmėmsypatingas tikslumas, didelis tvirtumas, didelis sukimo momento tankis ir ilgas tarnavimo laikas.
1. Kas yra RV cikloidinis smaigalio reduktorius?
RV cikloidinis keturračio reduktorius yra didelio{0}}našumo tiksli pavarų dėžė, kuri sujungiapriekinės-pakopos planetinės pavaros reduktoriussu agalinės{0}}pakopos cikloidinė pavarų dėžė. Šis dviejų-pakopų dizainas užtikrina ypač mažą-atsparumą, puikų sukimo standumą ir puikų atsparumą smūgiams.
Dėl šių savybių RV reduktoriai tapo tinkamiausiu transmisijos sprendimuroboto jungčių ašys, tikslūs sukimosi mechanizmai ir sunkios{0}}servo{1}}varomos sistemos.
2. Struktūrinė apžvalga
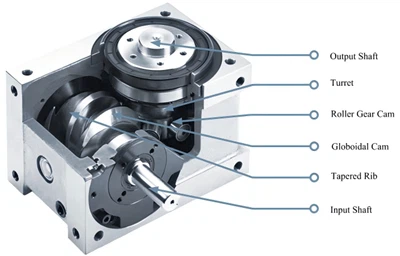
RV reduktorius susideda iš kelių didelio{0}}tikslumo komponentų, kurių kiekvienas prisideda prie sukimo momento perdavimo, tikslumo ir tvirtumo.

Įvesties velenas
Tiesiogiai prijungtas prie servo variklio, perduodantis didelio{0}}greičio sukimosi galią į reduktorių.
Planetinės pavaros scena
Suteikia pirmąjį mažinimo, greičio mažinimo, sukimo momento didinimo ir apkrovos mažinimo cikloidinėje stadijoje etapą.
Alkūninis velenas
Sukamąjį judesį paverčia ekscentriniu judesiu, varodamas cikloidines pavaras tiksliu orbitos keliu.
Cikloidinės pavaros
Pagrindiniai transmisijos elementai, kurie vienu metu susijungia su keliais kaiščiais, todėl užtikrina didelį sukimo momentą ir minimalų atstumą.
Pavarų kaiščio korpusas ir kaiščiai
Tolygiai paskirstyti grūdinti kaiščiai sudaro tvirtą žiedo struktūrą, dalijančią apkrovą keliuose kontaktiniuose taškuose.
Išėjimo velenas
Suteikia mažą{0}}greitį, didelį-sukimo momentą, puikų padėties nustatymo tikslumą ir pakartojamumą.
3. Darbo principas
Kai variklis varo įvesties veleną, galia pirmiausia sumažinama planetinės pavaros pakopoje. Tada alkūninis velenas ekscentriniu judesiu varo cikloidines pavaras.
Kadangi cikloidinės pavaros sujungiamos su keliais kaiščiais kaiščio korpuso viduje, dantų{0}}skaičių skirtumas sukuria didelį sumažinimo koeficientą. Galiausiai judesys perduodamas išėjimo velenui.
Keli dantys lieka įspausti vienu metu, sumažinant streso koncentraciją ir užtikrinant sklandų, stabilų ir tikslų judesį.
4. Pagrindiniai našumo pranašumai
Didelis kompaktiško dizaino mažinimo koeficientas:Kompaktiškoje konstrukcijoje pasiekiami dideli redukcijos koeficientai.
Itin-mažas atsukimas:Idealiai tinka didelio{0}}padėties nustatymo ir servo valdymo sistemoms.
Didelis tvirtumas ir apkrova:Kelių-dantukų sujungimas užtikrina išskirtinį sukimo standumą ir atsparumą smūgiams.
Ilgas gyvenimas-span: Tolygus apkrovos paskirstymas sumažina susidėvėjimą ir padidina patikimumą.
Didelis padėties nustatymo tikslumas ir pakartojamumas: Užtikrina pastovų tikslumą atliekant sudėtingas judesio valdymo užduotis.
5. Tipinės programos
· Pramoniniai robotai (jungtinės ašys)
· Bendradarbiaujantys robotai ir{0}}sunkios robotų rankos
·Automatizuotos surinkimo ir tvarkymo sistemos
· Tikslūs sukamieji stalai ir indeksavimo įrenginiai
·CNC staklės ir servo{0}}varoma įranga
·Puslaidininkinė ir{0}}aukštos klasės automatikos įranga
6.GIGA RV reduktoriaus konstrukcinis dizainas
GBX-C serija – tuščiavidurė konstrukcija

图1 GBX-C serijos tuščiavidurė konstrukcija
TheGBX-C serijos tuščiavidurės konstrukcijos RV reduktoriussukurtas robotizuotoms jungtims ir automatizavimo sistemoms, kurioms reikalingas vidinis kabelių, oro vamzdžių ar jutiklių linijų vedimas. Pritaikius didelio-skersmens tuščiavidurio veleno konstrukciją, reduktorius įgalina labai integruotą sistemos išdėstymą, išlaikant didelį standumą ir tikslumą.
Pagrindinės savybės:
· Didelio tuščiavidurio veleno konstrukcijaleidžia kabeliams, pneumatinėms linijoms ir signalų laidams eiti tiesiai per reduktorių, pagerinant sistemos integravimą.
· Kompaktiškas ašinis ilgispalaiko lengvą roboto jungties dizainą ir sumažina bendrą inerciją.
· Didelis sukimo standumasužtikrina stabilų padėties nustatymo tikslumą net esant dinaminiam judėjimui.
GBX{0}}C serija ypač tinkaroboto riešo ašys, besisukančiosstalo, ir kompaktiški automatikos moduliai, kur erdvės efektyvumas ir vidinis maršrutas yra labai svarbūs.
GBX-E serija – pagrindinė guolių vidinė konstrukcija

图 2 GBX-E serijos guolių vidinė konstrukcija
TheGBX{0}}E serijos pagrindinės guolio vidinės konstrukcijos RV reduktoriusintegruoja didelės talpos{0}}pagrindinį guolį tiesiai į reduktoriaus korpusą. Dėl šios konstrukcijos reduktorius gali palaikyti tiek transmisijos, tiek apkrovos{2}}guolio funkcijas, supaprastinant išorines konstrukcijas ir pagerinant bendrą sistemos tvirtumą.
Pagrindinės savybės:
· Integruota pagrindinio guolio konstrukcijagali atlaikyti dideles ašines ir radialines apkrovas;
· Patobulintas sistemos tvirtumas ir tikslumas, ypač esant konsolinėms ir perkabinamoms apkrovoms;
· Padidintas patikimumasilgalaikiam{0}}nepertraukiamam darbui robotų jungtyse.
GBX{0}}E serija puikiai tinkaroboto pagrindo ašys,{0}}sunkūs sukamieji jungtys ir įrenginiai su didelėmis išorinėmis apkrovomis, kur konstrukcijos stiprumas ir padėties stabilumas yra labai svarbūs.
7. Išvada
Kompaktiški, bet galingi RV cikloidiniai rato reduktoriai yra viena iš aukščiausio lygio tikslios transmisijos technologijos. Tai ne tik pavarų dėžės, bet ir svarbiausi komponentai, apibrėžiantys šiuolaikinių robotų ir automatizavimo sistemų veikimo ribas.